
今回は電気制御システムをモジュール化する場合の課題を考えていきたいと思います。
”つなげること”の重要性
モジュール設計では機能モジュールを共有化することで、設計の効率化を図りますが、別の見方をすると共有する機能モジュールが相互接続できることが前提条件となります。
前回は自動車を例にして説明しましたが、相互接続を行う上でメカシステムと電気制御システムの違いについて考えたいと思います。
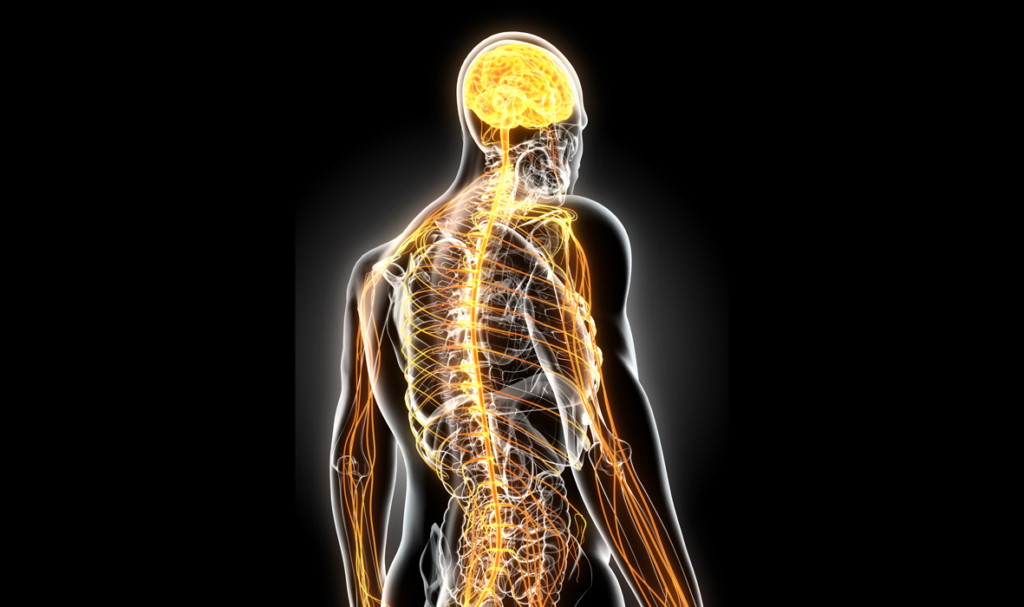
コネクタについて学ぼう②で解説しましたが、自動化生産設備における電気信号はヒトの持つ機能のような働きをします。
動力 = 筋力(モーターを動かす力)
制御 = 神経(感じたり、動かす司令を出す)
通信 = 会話(他のヒトと調整する)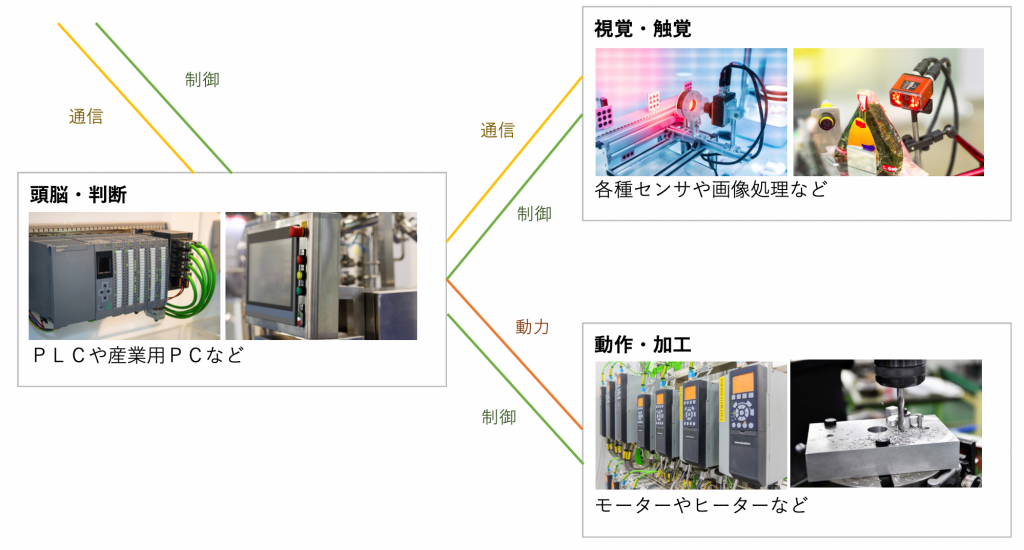
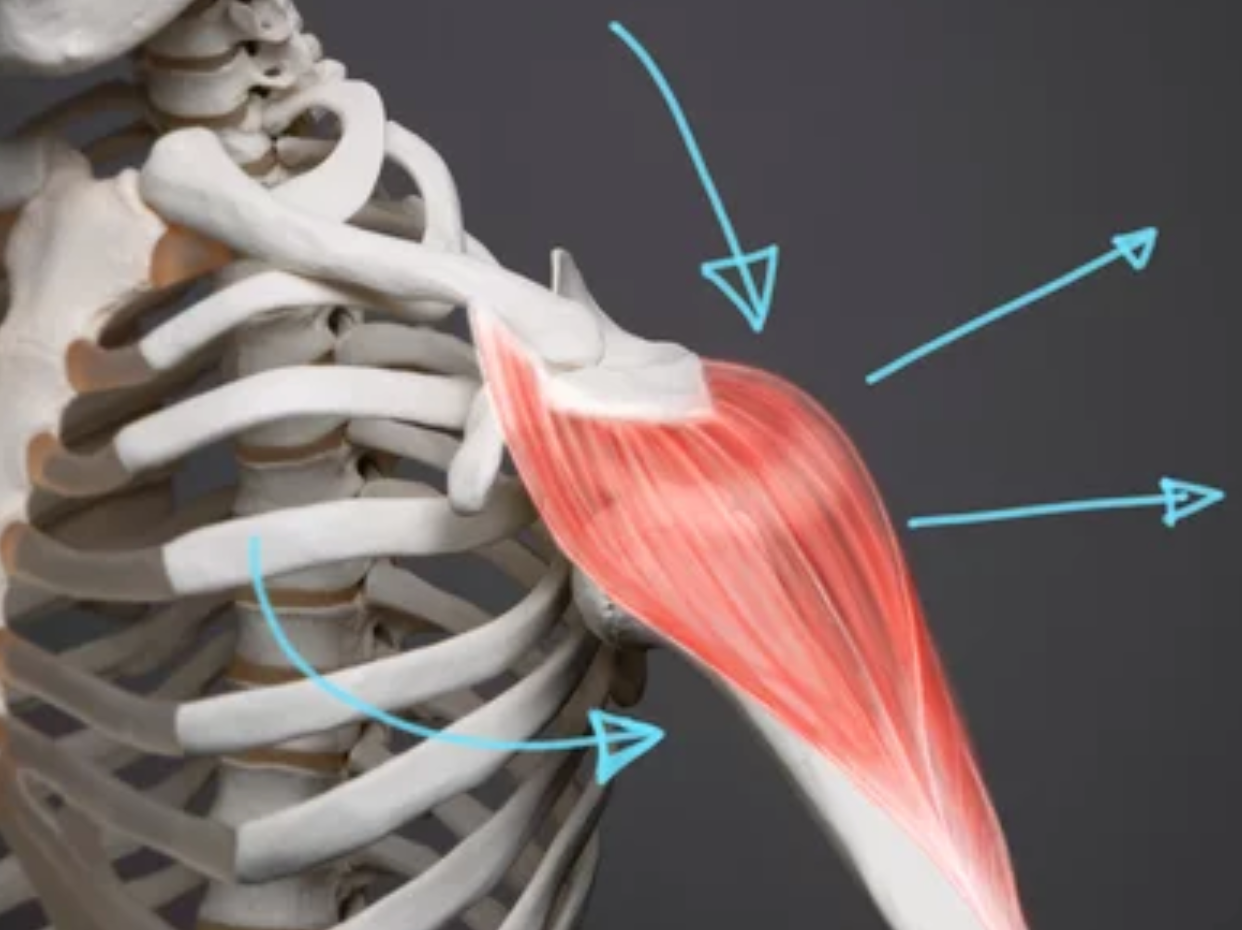
メカシステムの場合は骨と筋肉の役割が中心です。各機能モジュールの接続は関節や腱によって行われます。腕で考えると、上腕と前腕は肘を軸に接続されていますが、各機能に応じて1:1の接続がメインとなります。
一方で電気制御システムの場合はどうでしょうか?
例えば動力の場合、筋肉そのものはメカシステムの構成部品ですが、それを動かすための力を供給する必要があります。身体で例えると、血液によって筋肉に栄養が供給されます。
つまり、心臓や肺などの栄養と流れを作る臓器を中心に身体中を巡っており、途中で途切れてはなりません。
制御や通信についても同様で、脳を中心としたネットワークとなっています。
基本的に1:Nの接続が必要となります。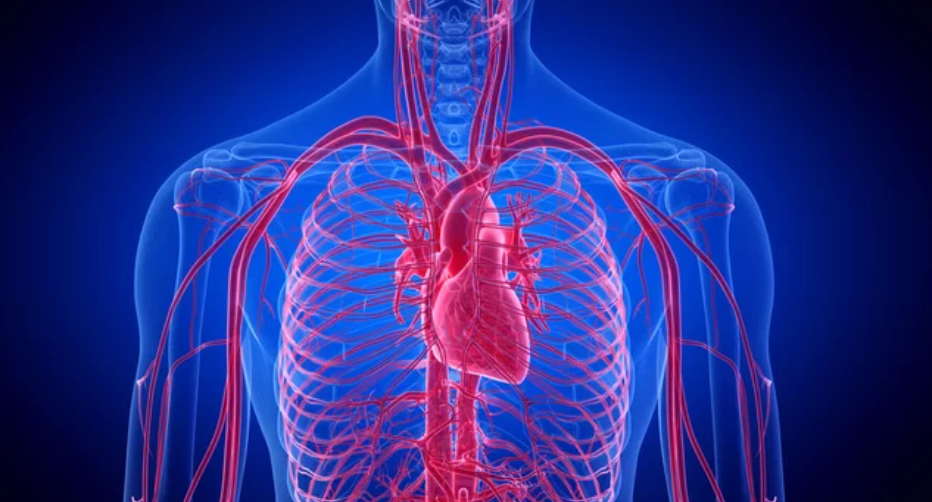
相互接続性について下記の通りまとめます。
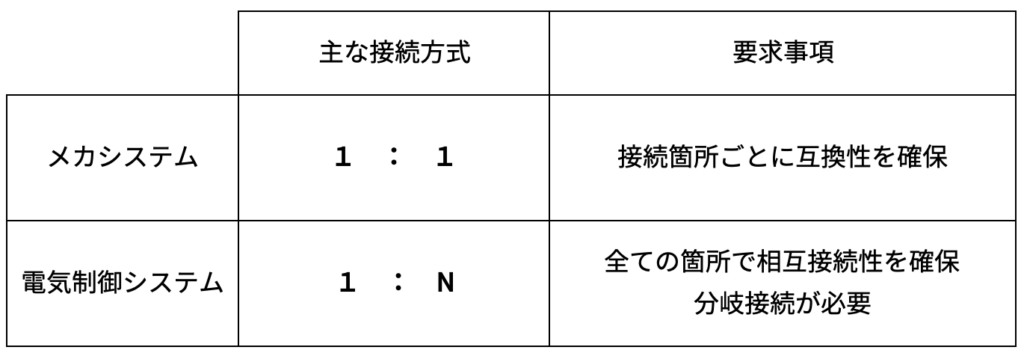
メカシステムと電気制御システムではモジュール化をすすめるにあたるアプローチ方法が違うようです。
前回解説した通り、メカシステムのモジュール化の流れは以下の通りです。
① 対象となる製品をレンジ別に分ける
② 同一レンジ内の製品で共通する機能をモジュール単位に分ける

電気制御システムをモジュール化する手法を検討していきましょう。
モジュール化のための第一歩

制御盤というと、ブレーカーやPLC、サーボアンプなどの大きなデバイスが目立ちますが、実際のところ組立において最も時間がかかるのが配線作業です。
これは電気制御システムは構成部品が配線(動力・制御・通信)によって相互接続されたネットワークに他ならないからです。
単純に配線は端子台の数だけありますので、500個の端子ペアに3mの配線を使用しているとすると、なんと制御盤内の配線は1500mにも及ぶことになります。
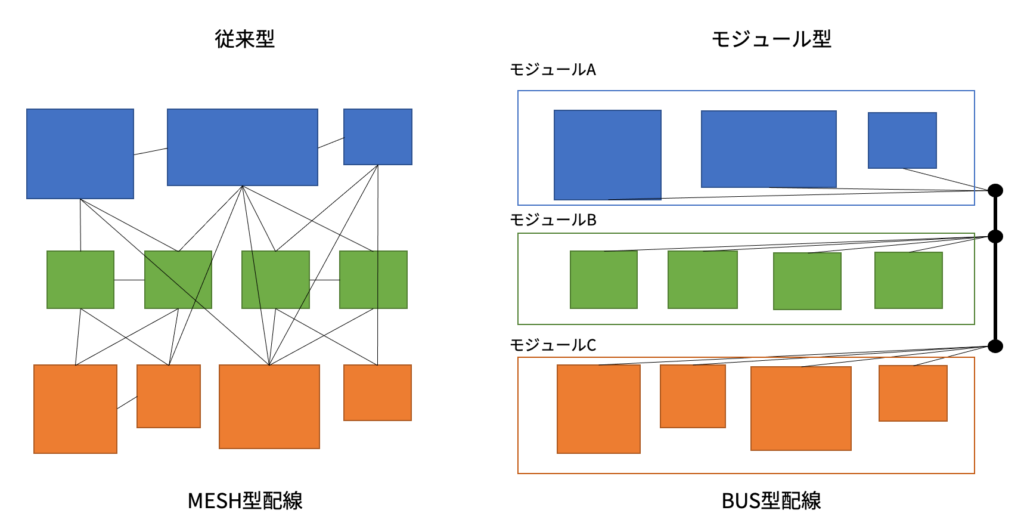
下記の表を見ていただくと、制御盤内の配線はトポロジーでいうとMESH型またはSTAR型になります。
これを色分けしたようにモジュール化しようとすると、機能モジュール間の接続が複雑になるため、相互接続性をもった設計を行うことが極めて困難となります。
そこで、電気制御システムをモジュール化するための第一歩として、BUS型のトポロジーを採用する必要があります。
BUS型を採用するためには、配線(動力・制御・通信)をBUS化する必要があります。
次回はBUS化を実現するテクノロジーについて検討したいと思います。





コメント
この記事へのトラックバックはありません。
総合カタログダウンロード

イルメ コンフィギュレーター

仕様に最適なコネクタを選定
アプリケーション

用途別に最適なコネクタを選定
各種ダウンロード






この記事へのコメントはありません。